 澳硕江苏自动化科技有限公司
澳硕江苏自动化科技有限公司400-002-3303
400-002-3303


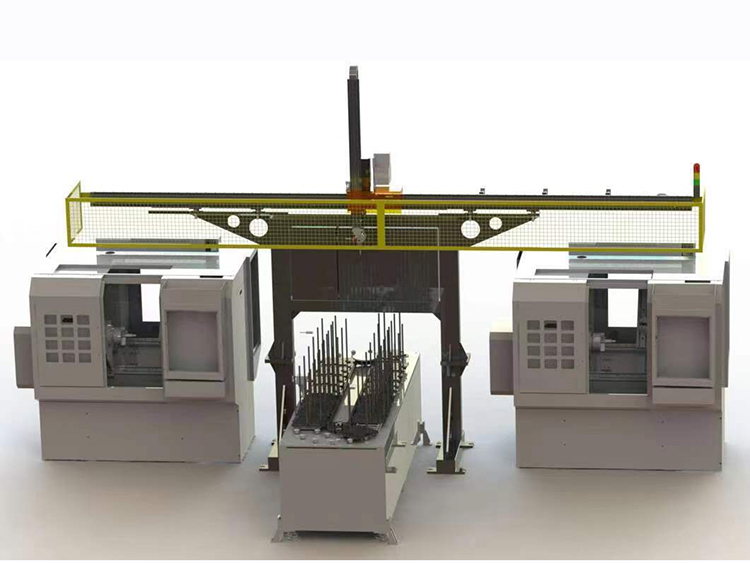
五轴伺服机械手执行系统的结构:
五轴伺服机械手的执行系统的结构包括产生引拔行的主副臂、产生横行的横梁和悬臂梁、以及产生上下(垂直)行的主副臂内外臂。主副手臂均采用内外臂嵌套的形式,同时给内外臂等速的驱动即可达到倍速的效果,这种高度集中的倍速结构不仅能大大的节约执行时间提高机器的使用寿命,而且将机械手整体高度减小到*低值符合厂家在普通小厂房使用的要求。受伺服电机控制,主副臂同步带带动外臂和内臂分别通过外臂滑块和内臂滑块上下运动。
五轴伺服机械手的手部是用来直接抓取注塑制品的部件。由于注塑制品的形状、大小、重量及表面特征等方面存在着差异。因此,机械手的手部有多种形式,一般可分为夹持式和吸附式两种。为了使得在取件过程中,塑料件跟水口料可以分开脱模,将机械手设计成双臂的形式,主手臂的末端安装吸盘用于吸取和释放塑料制品,副手臂的末端安装夹钳用于夹取回料。
服务热线








管理员
该内容暂无评论